[논문리뷰] ViewDiff: 3D-Consistent Image Generation with Text-to-Image Models
CVPR 2024. [Paper] [Page] [Github]
Lukas Höllein, Aljaž Božič, Norman Müller, David Novotny, Hung-Yu Tseng, Christian Richardt, Michael Zollhöfer, Matthias Nießner
Technical University of Munich | MIT EECS
4 Mar 2024
Introduction
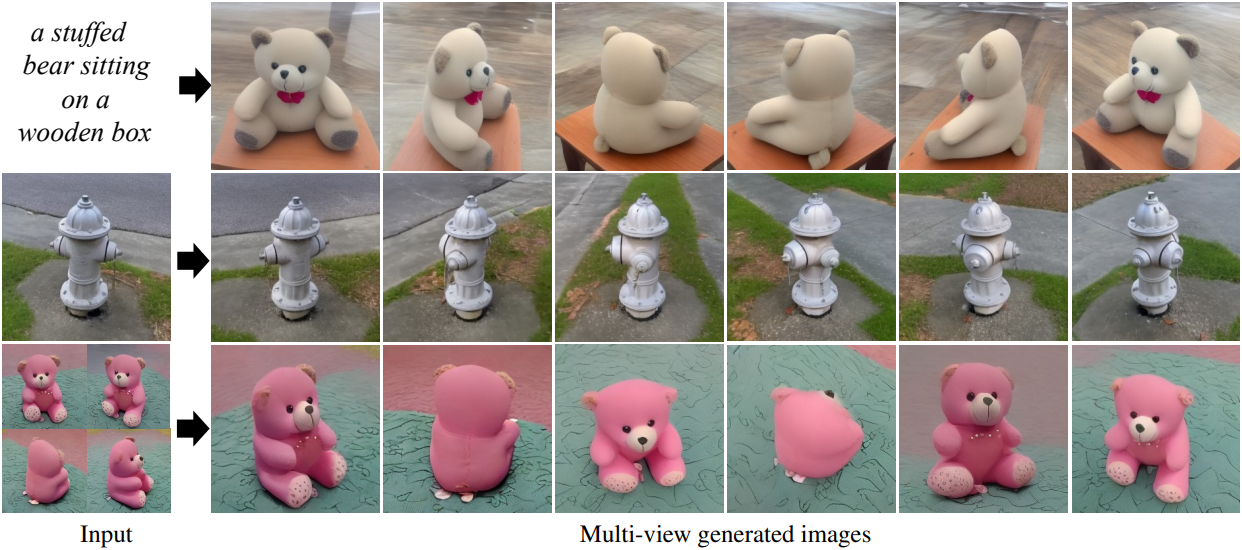
본 논문에서는 사전 학습된 text-to-image (T2I) diffusion model의 2D prior를 활용하여 사실적이고 3D에서 일치하는 3D 에셋 렌더링을 생성하는 방법을 제안하였다. 입력은 원하는 렌더링된 이미지의 카메라 포즈와 함께 텍스트 설명 또는 이미지이다. 제안된 접근 방식은 한 번의 forward pass에서 동일한 물체의 여러 이미지를 생성한다. 또한 새로운 시점에서 더 많은 이미지를 렌더링할 수 있는 autoregressive한 생성 방식을 사용한다. 구체적으로 기존 U-Net 아키텍처에 projection layer와 cross-frame-attention layer를 도입하여 생성된 물체에 대한 명시적인 3D 지식을 인코딩한다. 이를 통해 사전 학습된 가중치에 인코딩된 대규모의 2D prior의 이점을 활용하면서 CO3D와 같은 실제 3D 데이터셋에서 T2I 모델을 fine-tuning할 수 있는 길을 열었다.
Method
1. 3D-Consistent Diffusion
Diffusion model은 데이터 $x_0 \sim q(x_0)$와 latent variable $x_{1:T} = x_1, \ldots, x_T$에 대한 확률 분포 $p_\theta (x_0) = \int p_\theta (x_{0:T}) dx_{1:T}$를 학습하는 생성 모델의 한 종류이다. 본 논문의 방법은 사전 학습된 T2I 모델을 기반으로 하며, 이는 추가 텍스트 조건 $c$를 갖는 diffusion model $p_\theta (x_0 \; \vert \; c)$이다. (앞으로는 조건 c를 생략)
서로 3D에서 일치하는 여러 이미지 $x_0^{0:N}$을 한 번에 생성하기 위해, 이들의 공동 확률 분포
\[\begin{equation} p_\theta (x_0^{0:N}) = \int p_\theta (x_{0:T}^{0:N}) dx_{1:T}^{0:N} \end{equation}\]를 모델링한다. DDPM의 reverse process를 모든 이미지에 걸쳐 마르코프 체인으로 공동으로 적용하며, 이미지별로 샘플링한 Gaussian noise들의 세트 $p (x_T^{0:N})$에서 생성을 시작하여 하나의 이미지 세트 $p_\theta (x_0^{0:N})$를 생성한다.
\[\begin{equation} p_\theta (x_{0:T}^{0:N}) := p (x_T^{0:N}) \prod_{t=1}^T \prod_{n=0}^N p_\theta (x_{t-1}^n \; \vert \; x_t^{0:N}) \end{equation}\]모든 이미지에서 공유되는 신경망 $\mu_\theta$를 통해 이미지별 평균 $\mu_\theta^n (x_t^{0:N}, t)$를 예측하여 샘플들의 noise를 점진적으로 제거한다.
\[\begin{equation} p_\theta (x_{t-1}^n \; \vert \; x_t^{0:N}) = \mathcal{N} (x_{t-1}; \mu_\theta^n (x_t^{0:N}, t), \sigma_t^2 \mathbf{I}) \end{equation}\]중요한 점은 각 step에서 모델은 모든 이미지의 이전 상태 $x_t^{0:N}$를 사용한다는 것이다. 즉, 모델 예측 중에 이미지 간에 통신이 있다. $\mu_\theta$를 학습시키기 위해 forward process를 마르코프 체인으로 정의한다.
\[\begin{equation} q (x_{1:T}^{0:N} \; \vert \; x_0^{0:N}) = \prod_{t=1}^T \prod_{n=0}^N q (x_t^n \; \vert \; x_{t-1}^n) \\ \textrm{where} \quad q (x_t^n \; \vert \; x_{t-1}^n) = \mathcal{N} (x_t^n; \sqrt{1 - \beta_t} x_{t-1}^n, \beta_t \mathbf{I}) \end{equation}\]$\beta_1, \ldots, \beta_T$는 고정된 variance schedule이다.
DDPM을 따라 $\mu_\theta$ 대신 noise predictor $\epsilon_\theta$를 학습시킨다. $\epsilon_\theta$는 다음과 같은 L2 loss로 학습된다.
\[\begin{equation} \mathbb{E}_{x_0^{0:N}, \epsilon^{0:N} \sim \mathcal{N} (\mathbf{0}, \mathbf{I}), n} [\| \epsilon^n - \epsilon_\theta^n (x_t^{0:N}, t) \|^2] \end{equation}\]2. Augmentation of the U-Net architecture
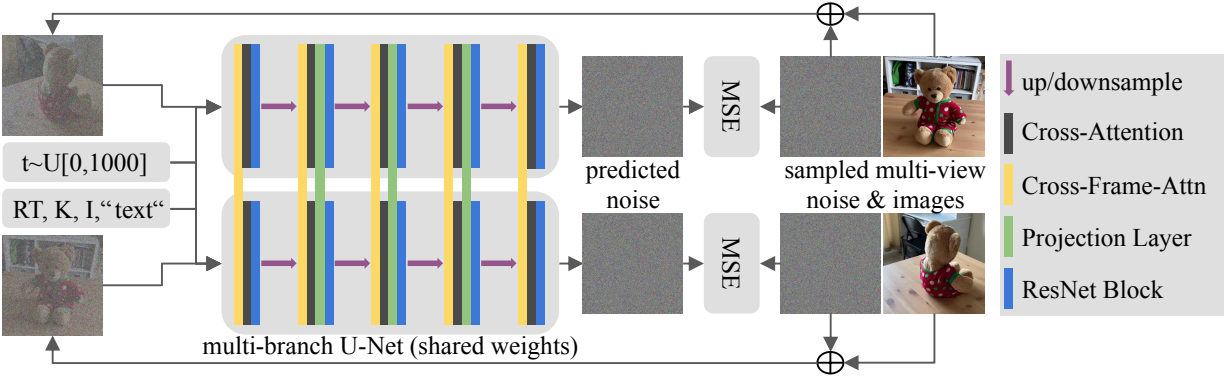
신경망 $\epsilon_\theta$를 통해 이미지별 noise $\epsilon_\theta^n (x_t^{0:N}, t)$를 예측한다. $\epsilon_\theta$는 기존 T2I 모델의 사전 학습된 가중치에서 초기화되며 일반적으로 U-Net 아키텍처로 정의된다. 모든 이미지의 이전 상태 $x_t^{0:N}$를 활용하여 3D에서 일관된 denoising step을 구성해야 한다. 이를 위해 U-Net 아키텍처에 cross-frame-attention layer와 projection layer를 추가한다. 모든 이미지가 별도의 Gaussian noise에서 시작하여 생성되므로 예측된 이미지별 noise는 이미지별이어야 한다. 따라서 기존 ResNet 및 ViT 블록을 fine-tuning하여 각 이미지에서 별도로 작동하는 약 2D 레이어를 유지하는 것이 중요하다.
Cross-Frame-Attention
동영상 diffusion model들(1, 2)에서 영감을 얻어 U-Net 아키텍처에 cross-frame-attention layer를 추가한다. 구체적으로 기존 self-attention layer를 수정하여
\[\begin{equation} \textrm{CFAttn} (Q, K, V) = \textrm{softmax} (\frac{QK^T}{\sqrt{d}}) V \\ \textrm{with} \quad Q = W^Q h_i, \quad W^K [h_j]_{j \ne i}, \quad V = W^V [h_j]_{j \ne i} \end{equation}\]를 계산한다. 여기서 $W^Q$, $W^K$, $W^V$는 feature projection을 위해 사전 학습된 가중치이며, $h_i \in \mathbb{R}^{C \times H \times W}$는 각 이미지 $i$의 feature이다. Cross-frame-attention layer를 통해 모든 이미지들 사이의 feature들을 매칭하고 동일한 글로벌 스타일을 생성한다.
또한, 모든 cross-frame-attention layer와 cross-attention layer에 컨디셔닝 벡터를 추가하여 네트워크에 각 이미지의 시점에 대한 정보를 제공한다.
- 각 이미지의 카메라 행렬 $p \in \mathbb{R}^{4 \times 4}$를 $z_1 \in \mathbb{R}^4$에 인코딩하여 카메라 포즈 정보를 추가한다.
- 각 카메라의 focal length와 principal point를 임베딩 $z_2 \in \mathbb{R}^4$에 concatenate한다.
- 이미지 RGB 값의 평균과 분산을 $z_3 \in \mathbb{R}^2$에 저장한다. (intensity encoding)
학습 시에는 $z_3$를 각 입력 이미지의 실제 값으로 설정하고 테스트 시에는 모든 이미지에 대해 $z_3 = [0.5, 0]$로 설정한다. 이것은 데이터셋에 포함된 뷰에 따른 조명 차이를 줄이는 데 도움이 된다. 컨디셔닝 벡터를 $z = [z_1, z_2, z_3]$로 구성하고 LoRA-linear-layer $W^{\prime Q}$를 통해 feature projection layer $Q$에 추가한다.
\[\begin{equation} Q = W^Q h_i + W^{\prime Q} [h_i; z] \end{equation}\]마찬가지로 $W^{\prime K}$와 $W^{\prime V}$를 통해 $K$와 $V$에 조건을 추가한다.
Projection Layer
Cross-frame-attention layer는 3D에서 일관된 이미지를 생성하는 데 도움이 된다. 그러나 물체는 지정된 포즈를 정확하게 따르지 않아 뷰 불일치가 발생한다. 이를 위해 U-Net 아키텍처에 projection layer를 추가한다. 이 레이어의 아이디어는 다음 U-Net 레이어에서 추가로 처리되는 3D에서 일관된 feature를 만드는 것이다. U-Net의 모든 단계에서 이 레이어를 반복하여 이미지별 feature가 3D에서 일관되는지 확인한다. 첫 번째 및 마지막 U-Net 블록의 경우 projection layer를 추가하였을 때의 이점이 없으므로 추가하지 않는다. 이는 네트워크가 해당 단계에서 이미지별 정보를 처리하므로 3D 일관된 feature space가 필요하지 않기 때문이다.
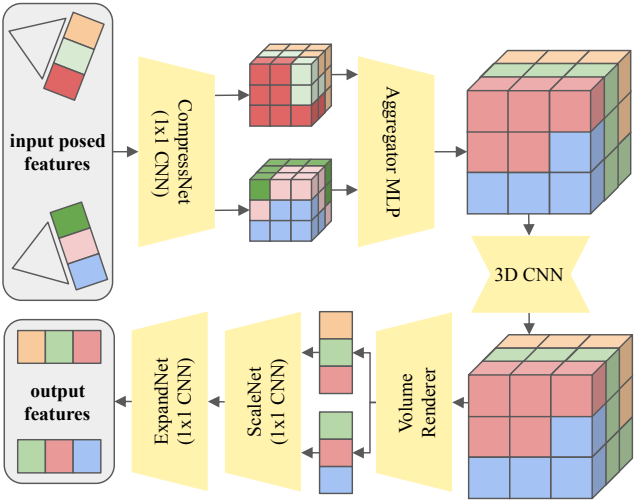
Projection layer는 다음과 같이 작동한다.
- 모든 입력 feature \(h_\textrm{in}^{0:N} \in \mathbb{R}^{C \times H \times W}\)에서 3D feature voxel grid를 생성하고 각 voxel을 각 이미지 평면으로 projection한다.
- 1$\times$1 convolution으로 \(h_\textrm{in}^{0:N}\)을 축소된 feature 차원 $C^\prime = 16$으로 압축한다. 그런 다음 이미지 평면 위치에서 bilinearly interpolate된 feature를 가져와 voxel에 배치한다.
- 뷰별 voxel grid를 aggregator MLP를 통해 이를 하나의 grid로 병합한다. IBRNet에서 영감을 받아 MLP는 뷰별 가중치를 예측한 다음 feature의 가중 평균을 예측한다.
- Voxel grid에서 작은 3D CNN을 실행하여 3D feature space를 정제한다.
- NeRF와 유사한 볼륨 렌더링을 사용하여 voxel grid를 출력 feature \(h_\textrm{out}^{0:N} \in \mathbb{R}^{C^\prime \times H \times W}\)로 렌더링한다. Voxel grid의 절반을 전경에, 절반을 배경에 할당하고 ray-marching 중에 MERF의 배경 모델을 적용한다.
- 볼륨 렌더러는 ray-marching 중에 시그모이드를 최종 레이어로 사용하지만, 입력 feature는 임의의 부동 소수점 범위로 정의된다. \(h_\textrm{out}^{0:N}\)을 다시 같은 범위로 변환하기 위해 1$\times$1 convolution과 ReLU를 사용하여 feature를 비선형적으로 스케일링한다.
- \(h_\textrm{out}^{0:N}\)을 입력 feature 차원 $C$로 확장한다.
3. Autoregressive Generation
학습하는 동안 $N = 5$로 설정하지만 inference 시에 메모리 제약 조건까지 (ex. $N = 30$) 늘릴 수 있다. 그러나 네트워크를 사용하여 가능한 모든 시점에서 물체를 렌더링하고자 한다. 이를 위해 autoregressive한 이미지 생성 방식을 사용한다. 즉, 이전에 생성된 이미지로 다음 시점의 생성을 컨디셔닝한다. 각 이미지의 timestep $t^{0:N}$을 U-Net의 입력으로 제공하며, $t^{0:N}$을 변화시킴으로써 다양한 유형의 컨디셔닝을 할 수 있다.
Unconditional Generation
모든 샘플은 Gaussian noise로 초기화되고 공동으로 denoising된다. Timestep $t^{0:N}$은 reverse process 전반에 걸쳐 모든 샘플에 대해 동일하게 유지된다. 하나의 텍스트 프롬프트와 이미지별 서로 다른 카메라를 제공한다.
Image-Conditional Generation
총 샘플 수 $N = n_c + n_g$를 조건부 부분 $n_c$와 생성 부분 $n_g$로 나눈다. 처음 $n_c$ 개의 샘플은 입력으로 제공된 이미지와 카메라에 해당한다. 다른 $n_g$개의 샘플은 조건부 이미지와 유사한 새로운 뷰를 생성해야 한다. $n_g$개의 샘플에 대해 Gaussian noise에서 생성을 시작하고 다른 샘플을 위해 noise가 없는 이미지를 제공한다. 마찬가지로, 모든 denoising step에 대해 $t^{0:n_c} = 0$으로 설정하고 $t^{n_g:N}$을 점진적으로 감소시킨다.
$n_c = 1$일 때, 단일 이미지 재구성을 수행한다. $n_c > 1$로 설정하면 이전 이미지에서 새로운 뷰를 autoregressive하게 생성할 수 있다. 실제로는 먼저 unconditional하게 이미지 batch 하나를 생성한 다음 이전 이미지의 부분집합으로 다음 atch를 컨디셔닝한다. 이를 통해 매끄러운 궤적으로 렌더링할 수 있다.
Results
- 데이터셋: CO3Dv2
- 카테고리: Teddybear, Hydrant, Apple, Donut
- 카테고리별로 500 ~ 1,000개의 object, 각 object당 200개의 이미지
- 해상도: 256$\times$256
- 구현 디테일
- voxel grid를 구축할 때 마지막 이미지는 생략
- fine-tuning
- VAE 인코더와 디코더는 고정하고 U-Net만 fine-tuning
- 확률 $p_1$ = 0.25와 $p_2$ = 0.25로 첫 번째 및/또는 두 번째 이미지를 입력으로 제공하고 해당 timestep을 0으로 설정
- optimizer: AdamW
- iteration: 60,000
- 전체 batch size: 64
- learning rate: 볼륨 렌더러만 0.005, 나머지 레이어는 $5 \times 10^{-5}$
- GPU: NVIDIA A100 2개에서 약 7일 소요
- inference
- batch당 30개의 이미지를 생성
- GPU: RTX 3090 1개에서 약 15초 소요
- sampler: UniPC (10 denoising step)
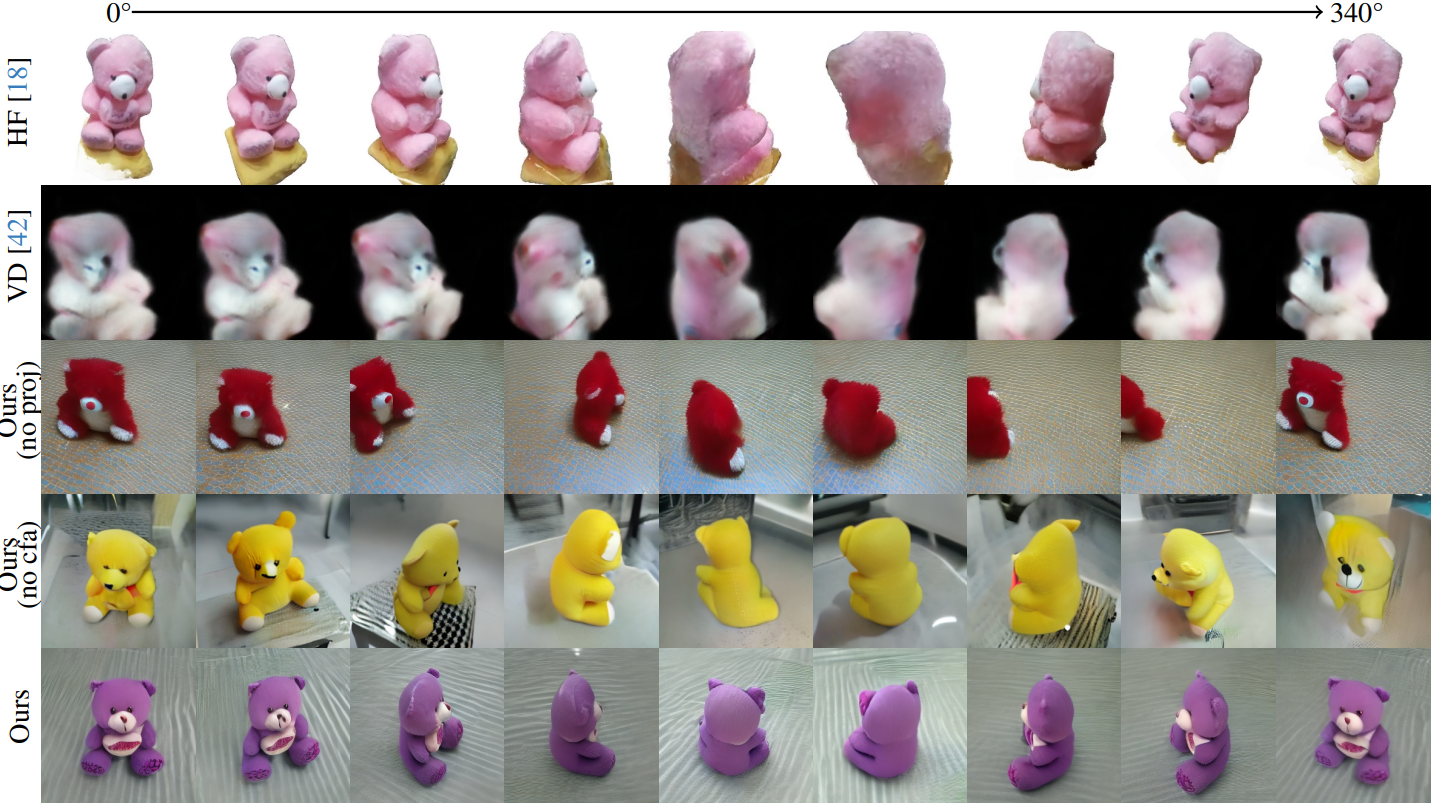
1. Unconditional Generation
첫 번째 batch는 guidance scale \(\lambda_\textrm{cfg} = 7.5\)로 $N = 10$개의 이미지를 생성한다. 그런 다음 나머지 batch들은 \(\lambda_\textrm{cfg} = 0\)로 설정하고 object당 총 100개의 이미지를 생성한다.
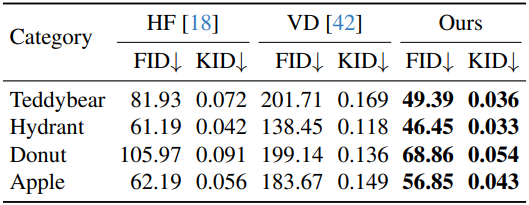
다음은 unconditional한 이미지 생성에 대한 결과를 HoloFusion (HF), ViewsetDiffusion (VD)과 비교한 것이다.

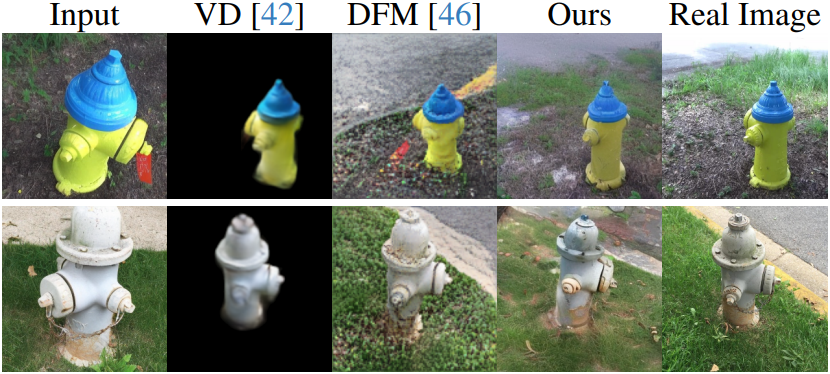
2. Single-Image Reconstruction
데이터셋에서 하나의 이미지를 샘플링하고, 역시 데이터셋에서 샘플링한 새로운 시점에서 20개의 이미지를 생성한다.
다음은 single-image reconstruction에 대하여 ViewsetDiffusion, DFM과 비교한 결과이다.

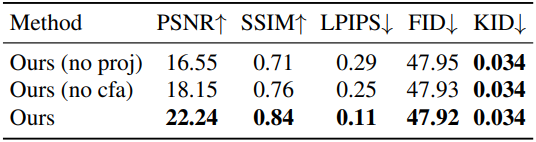
3. Ablations
다음은 ablation 결과이다. (unconditional image generation)
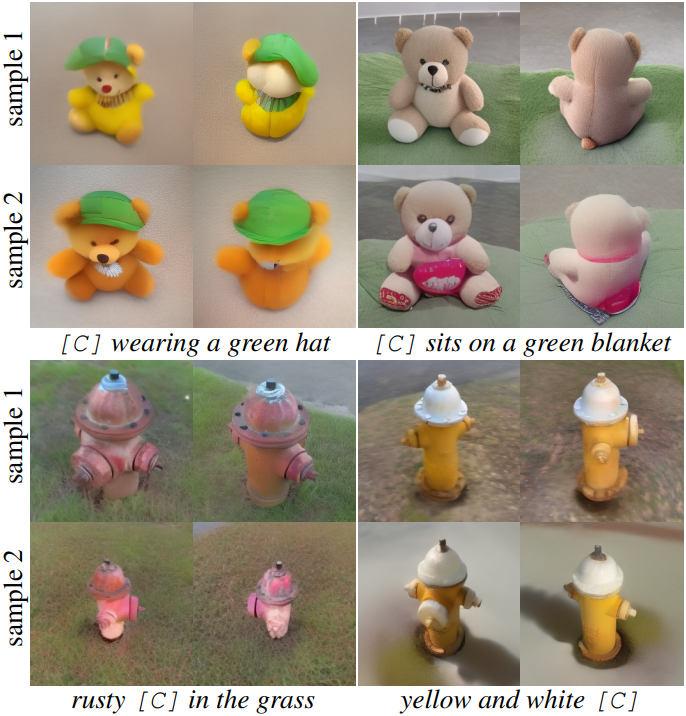
다음은 생성된 여러 샘플들을 비교한 것이다.
Limitations
- 때때로 약간 불일치한 이미지를 생성한다. 모델은 뷰에 따른 효과를 가지는 실제 데이터셋에서 fine-tuning되므로 다양한 시점에서 이러한 변형을 생성하는 방법을 학습한다.
- 본 논문의 방법은 물체 중심의 장면에만 초점을 맞추고 있다.