[논문리뷰] Mip-NeRF 360: Unbounded Anti-Aliased Neural Radiance Fields
CVPR 2022 (Oral). [Paper] [Page] [Github]
Jonathan T. Barron, Ben Mildenhall, Dor Verbin, Pratul P. Srinivasan, Peter Hedman
Google | Harvard University
23 Nov 2021
Introduction
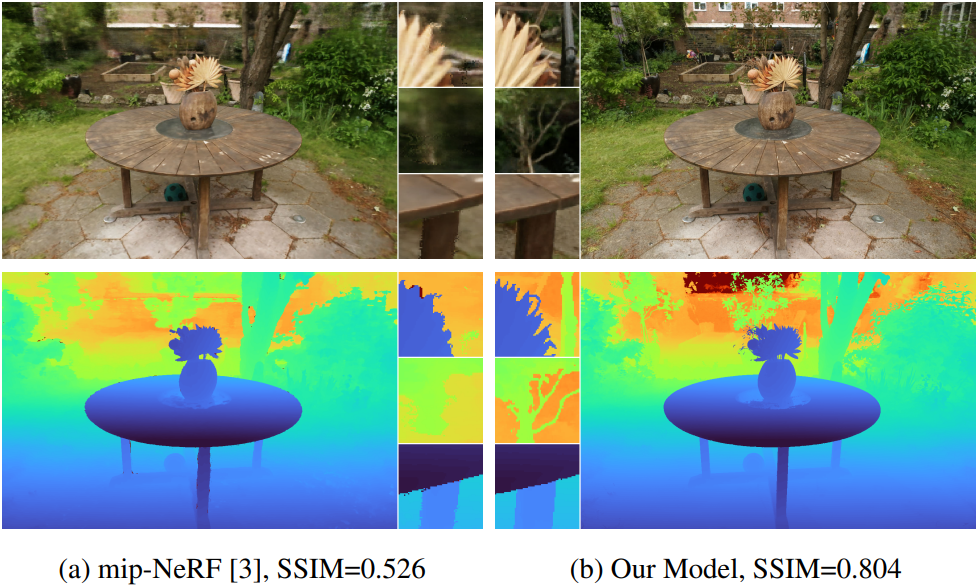
NeRF는 좌표 기반 MLP의 가중치 내에서 장면의 볼륨 밀도와 색상을 인코딩하여 장면의 매우 사실적인 렌더링을 합성한다. 이 접근 방식을 통해 사실적인 뷰 합성에 대한 상당한 진전이 가능해졌다. 그러나 NeRF는 광선을 따라 매우 작은 3D 포인트를 사용하여 MLP에 대한 입력을 모델링하므로 다양한 해상도의 뷰를 렌더링할 때 앨리어싱이 발생한다. mip-NeRF는 NeRF를 확장하여 원뿔을 따라 절두체를 추론함으로써 이 문제를 해결했다. 이로 인해 품질은 향상되지만 NeRF와 mip-NeRF는 카메라가 어떤 방향을 향하고 장면 콘텐츠가 어떤 거리에도 존재할 수 있는 무한한 장면을 처리할 때 어려움을 겪는다. 본 논문에서는 무한한 장면의 사실적인 렌더링을 생성할 수 있는 mip-NeRF 360이라고 하는 mip-NeRF의 확장판을 제시하였다.
제한이 없는 대규모 장면에 NeRF-like 모델을 적용하면 세 가지 중요한 문제가 발생한다.
- Parameterization: 제한이 없는 360도 장면은 유클리드 공간의 임의의 넓은 영역을 차지할 수 있지만 mip-NeRF에서는 3D 장면 좌표가 제한된 도메인에 있어야 한다.
- Efficiency: 크고 상세한 장면에는 더 많은 네트워크 용량이 필요하지만 학습 중에 각 광선을 따라 대규모 MLP를 조밀하게 쿼리하는 것은 비용이 많이 든다.
- Ambiguity: 제한이 없는 장면의 콘텐츠는 거리에 상관없이 존재할 수 있으며 소수의 광선으로만 관찰되므로 2D 이미지에서 3D 콘텐츠를 재구성할 때 내재된 모호성이 더욱 악화된다.
Scene and Ray Parameterization
제한이 없는 장면에 대한 포인트의 parameterization에 대한 연구들이 있지만 이는 Gaussian을 reparameterize해야 하는 mip-NeRF에 대한 솔루션을 제공하지 않았다. 이를 위해 먼저 $f(x)$를 $\mathbb{R}^n \rightarrow \mathbb{R}^n$으로 매핑되는 부드러운 좌표 변환으로 정의하자. 이 함수의 선형 근사는 다음과 같다.
\[\begin{equation} f(\mathbf{x}) \approx f(\boldsymbol{\mu}) + \mathbf{J}_f (\boldsymbol{\mu}) (\mathbf{x} - \boldsymbol{\mu}) \end{equation}\]여기서 \(\mathbf{J}_f (\boldsymbol{\mu})\)는 $\boldsymbol{\mu}$에서 $f$의 Jacobian이다. 이를 통해 다음과 같이 $f$를 $(\boldsymbol{\mu}, \mathbf{\Sigma})$에 적용할 수 있다.
\[\begin{equation} f(\boldsymbol{\mu}, \mathbf{\Sigma}) = (f(\boldsymbol{\mu}), \mathbf{J}_f (\boldsymbol{\mu}) \mathbf{\Sigma} \mathbf{J}_f (\boldsymbol{\mu})^\top) \end{equation}\]이는 고전적인 칼만 필터와 동일하다. 여기서 $f$는 state transition model이다. $f$에 대한 선택은 다음과 같은 contraction이다.
\[\begin{equation} \textrm{contract} (\mathbf{x}) = \begin{cases} \mathbf{x} & \; \| \mathbf{x} \| \le 1 \\ \bigg( 2 - \frac{1}{\| \mathbf{x} \|} \bigg) \bigg( \frac{\mathbf{x}}{\| \mathbf{x} \|} \bigg) & \; \| \mathbf{x} \| > 1 \end{cases} \end{equation}\]이 디자인은 NDC(normalized device coordinates)와 동일한 동기를 공유한다. 즉, 먼 지점은 거리가 아닌 시차(거리의 역수)에 비례하여 분포되어야 한다. 본 논문의 모델에서는 다음 식에 따라 유클리드 공간에서 mip-NeRF의 IPE feature를 사용하는 대신 이 축소된 공간에서 유사한 feature를 사용한다.
\[\begin{equation} \gamma (\textrm{contract} (\boldsymbol{\mu}, \mathbf{\Sigma})) \\ \textrm{where} \; \gamma (\boldsymbol{\mu}, \mathbf{\Sigma}) = \bigg\{ \begin{bmatrix} \sin (2^\ell \boldsymbol{\mu}) \exp (-2^{2 \ell - 1} \textrm{diag} (\mathbf{\Sigma})) \\ \cos (2^\ell \boldsymbol{\mu}) \exp (-2^{2 \ell - 1} \textrm{diag} (\mathbf{\Sigma})) \end{bmatrix} \bigg\}_{\ell = 0}^{L-1} \end{equation}\]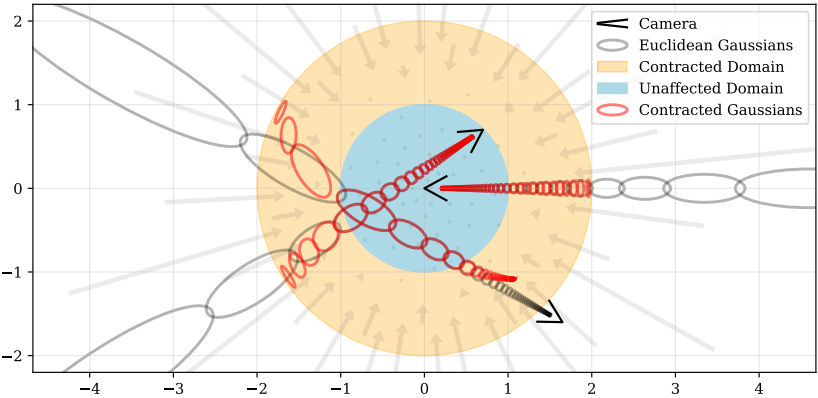
위 그림은 이 parameterization을 시각화한 것이다.
3D 좌표를 어떻게 parameterization해야 하는지에 대한 질문 외에도 광선 거리 $t$를 어떻게 선택해야 하는지에 대한 질문도 있다.
\[\begin{equation} t^c \sim \mathcal{U} [t_n, t_f], \quad \mathbf{t}^c = \textrm{sort} (\{t^c\}) \end{equation}\]NeRF에서 이는 일반적으로 위 식에 따라 근거리 및 원거리 평면에서 균일하게 샘플링하여 수행된다. 그러나 NDC parameterization이 사용되는 경우 균일한 간격의 샘플들은 실제로 깊이의 역수(시차)에 균일한 간격으로 배치된다. 이 디자인 결정은 카메라가 한 방향만을 향할 때의 제한이 없는 장면에 적합하지만 모든 방향에서의 제한이 없는 장면에는 적용할 수 없다. 따라서 거리 $t$를 시차에 따라 선형적으로 명시적으로 샘플링한다.
시차 측면에서 광선을 parameterize하기 위해 유클리드 광선 거리 $t$와 정규화된 광선 거리 $s$ 사이의 가역 매핑을 정의한다.
\[\begin{equation} s = \frac{g(t) - g(t_n)}{g(t_f) - g(t_n)} \\ t = g^{-1} (s \cdot g(t_f) + (1-s) \cdot g(t_n)) \end{equation}\]여기서 $g$는 가역 함수이다. 이는 $[t_n, t_f]$에 매핑되는 정규화된 광선 거리 $s \in [0, 1]$를 제공한다. $g(x) = 1/x$로 설정하면 공간에 균일하게 분포된 광선 샘플을 구성함으로써 $t$-거리가 시차적으로 선형으로 분포되는 광선 샘플을 생성한다. 본 논문의 모델에서는 $t$-거리를 사용하여 샘플링을 수행하는 대신 $s$-거리를 사용하여 샘플링을 수행한다. 이는 초기 샘플이 선형적으로 시차를 두고 배치될 뿐만 아니라 가중치 $w$의 개별 간격에서 후속 리샘플링도 유사하게 분포된다. 위 그림의 중앙에 있는 카메라에서 볼 수 있듯이, 광선 샘플의 선형 시차 간격은 균형을 이루는 $\textrm{contract}(\cdot)$을 나타낸다.
이러한 장면 좌표 공간의 설계를 통해 원래 NeRF 논문의 매우 효과적인 설정, 즉 제한된 공간 내에서의 균일한 간격의 광선 간격과 매우 유사한 제한이 없는 장면의 parameterization을 제공한다.
Coarse-to-Fine Online Distillation
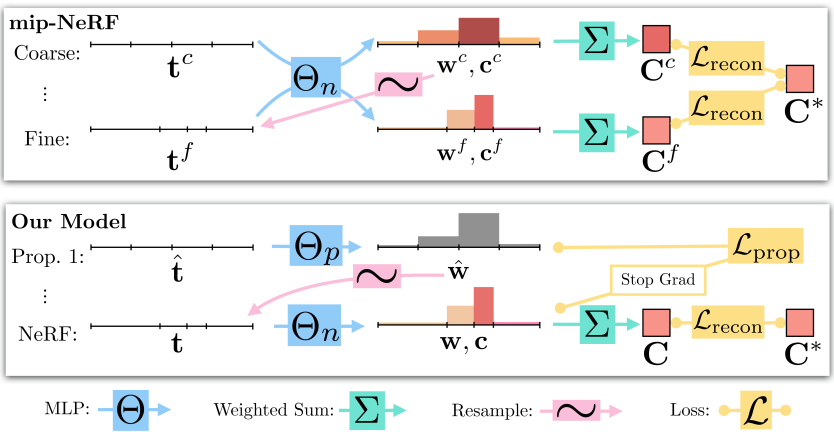
mip-NeRF는 MLP가 coarse ray interval을 사용하여 한 번 평가되고 다시 fine ray interval을 사용하여 평가되며, 두 수준 모두에서 이미지 재구성 loss를 사용하여 supervise되는 coarse-to-fine 리샘플링 전략을 사용한다. 대신에 mip-NeRF 360은 “NeRF MLP” $\Theta_\textrm{NeRF}$ (NeRF와 mip-NeRF에서 사용하는 MLP와 유사하게 동작함)와 “proposal MLP” $\Theta_\textrm{prop}$이라는 두 개의 MLP를 학습시킨다.
proposal MLP는 위 식에 따라 proposal 가중치 벡터 \(\hat{\mathbf{w}}\)로 변환된 볼륨 밀도를 예측하지만 색상을 예측하지는 않는다. 이러한 proposal 가중치 \(\hat{\mathbf{w}}\)는 자체 가중치 벡터 $\mathbf{w}$를 예측하는 NeRF MLP에 제공되는 $s$-간격을 샘플링하는 데 사용된다. proposal MLP는 입력 이미지를 재현하도록 학습되지 않고 대신 NeRF MLP에 의해 생성된 가중치 $\mathbf{w}$를 제한하도록 학습된다. 두 MLP 모두 랜덤하게 초기화되고 공동으로 학습되므로 이 supervision은 NeRF MLP 지식을 proposal MLP에 대한 일종의 “online distillation”로 생각할 수 있다.
저자들은 큰 NeRF MLP와 작은 proposal MLP를 사용한다. 또한 많은 샘플을 사용하여 proposal MLP에서 반복적으로 평가하고 리샘플링하지만 NeRF MLP는 더 작은 샘플 집합으로 한 번만 평가한다. 이는 mip-NeRF보다 용량이 훨씬 높지만 학습 비용이 약간 더 비싼 것처럼 동작하는 모델을 제공한다. proposal 분포를 모델링하기 위해 작은 MLP를 사용하는 것은 정확도를 감소시키지 않는다. 이는 NeRF MLP를 distillation하는 것이 뷰 합성보다 더 쉬운 task임을 시사한다.
이 online distillation에는 proposal MLP \((\hat{\mathbf{t}}, \hat{\mathbf{w}})\)와 NeRF MLP $(\mathbf{t}, \mathbf{w})$의 히스토그램이 일관되도록 장려하는 loss function이 필요하다. 두 히스토그램 사이의 차이점을 최소화하는 것이 잘 정립된 task이기 때문에 처음에는 이 문제가 사소해 보일 수 있다. 그러나 히스토그램 $\mathbf{t}$와 $\hat{\mathbf{t}}$의 “bin”은 비슷할 필요가 없다. 실제로 proposal MLP가 성공적으로 집합을 선별하는 경우 장면 콘텐츠가 존재하는 거리의 $\mathbf{t}$와 $\hat{\mathbf{t}}$는 매우 다를 것이다.
여러 연구들에서 동일한 bin을 가진 두 히스토그램 간의 차이를 측정하기 위한 수많은 접근 방식이 제시되어 있지만 본 논문의 경우는 상대적으로 연구가 부족하다. 이 문제는 하나의 히스토그램 bin 내의 콘텐츠 분포에 대해 아무 것도 가정할 수 없기 때문에 어렵다. 가중치가 0이 아닌 구간은 해당 구간 전체에 걸쳐 균일한 가중치 분포, 해당 구간의 어느 위치에 있는 델타 함수 또는 수많은 다른 분포를 나타낼 수 있다. 따라서 저자들은 다음과 같은 가정 하에 loss를 구성하였다.
하나의 질량 분포를 사용하여 두 히스토그램을 설명할 수 있는 경우 loss는 0이어야 한다.
0이 아닌 loss는 두 히스토그램이 동일한 “실제” 질량 분포를 반영하는 것이 불가능한 경우에만 발생할 수 있다.
이를 위해 먼저 간격 $T$와 겹치는 모든 proposal 가중치의 합을 계산하는 함수를 정의한다.
\[\begin{equation} \textrm{bound} (\hat{\mathbf{t}}, \hat{\mathbf{w}}, T) = \sum_{j: T \cap \hat{T}_j \ne \varnothing} \hat{w}_j \end{equation}\]만일 두 히스토그램이 서로 일치하면 $(\mathbf{t}, \mathbf{w})$의 모든 간격 $(T_i, w_i)$에 대해 \(w_i \le \textrm{bound} (\hat{\mathbf{t}}, \hat{\mathbf{w}}, T_i)\)를 유지해야 한다. Loss는 이 부등식을 위반하고 이 bound를 초과하는 잉여 히스토그램 질량에 불이익을 준다.
\[\begin{equation} \mathcal{L}_\textrm{prop} (\mathbf{t}, \mathbf{w}, \hat{\mathbf{t}}, \hat{\mathbf{w}}) = \sum_i = \frac{1}{w_i} \max (0, w_i - \textrm{bound} (\hat{\mathbf{t}}, \hat{\mathbf{w}}, T_i))^2 \end{equation}\]이 loss는 NeRF MLP의 분포를 과소평가하기 위해 proposal 가중치에만 페널티를 적용하기를 원하기 때문에 비대칭이다. proposal 가중치가 NeRF 가중치보다 더 coarse하기 때문에 그 위에 upper envelope를 형성하므로 과대평가가 예상된다. $w_i$로 나누면 bound에 대한 이 loss의 기울기가 bound가 0일 때 일정한 값이 되도록 보장하여 올바르게 동작하는 최적화를 유도한다. $\mathbf{t}$와 $\hat{\mathbf{t}}$는 정렬되어 있으므로 summed-area table을 사용하여 위 식을 효율적으로 계산할 수 있다. 이 loss는 거리 $t$의 단조 변환에 불변하므로 ($\mathbf{w}$와 $\hat{\mathbf{w}}$가 이미 $t$-공간에서 계산되었다고 가정) 유클리드 광선 $t$-거리에 적용하든 정규화된 광선 $s$-거리에 적용하든 동일하게 동작한다.
NeRF 히스토그램 $(\mathbf{t}, \mathbf{w})$과 모든 proposal 히스토그램 \((\hat{\mathbf{t}}^k, \hat{\mathbf{w}})^k\) 사이에 이 loss를 부과한다. NeRF MLP는 mip-NeRF에서와 같이 입력 이미지에 대한 재구성 loss \(\mathcal{L}_\textrm{recon}\)을 사용하여 supervise된다. NeRF MLP가 리드하고 proposal MLP가 따르도록 \(\mathcal{L}_\textrm{prop}\)을 계산할 때 NeRF MLP의 출력 $\mathbf{t}$와 $\mathbf{w}$에 stop-gradient를 배치한다. 그렇지 않으면 NeRF가 proposal MLP의 task를 덜 어렵게 만들기 위해 장면을 더 나쁘게 재구성하도록 권장될 수 있다.
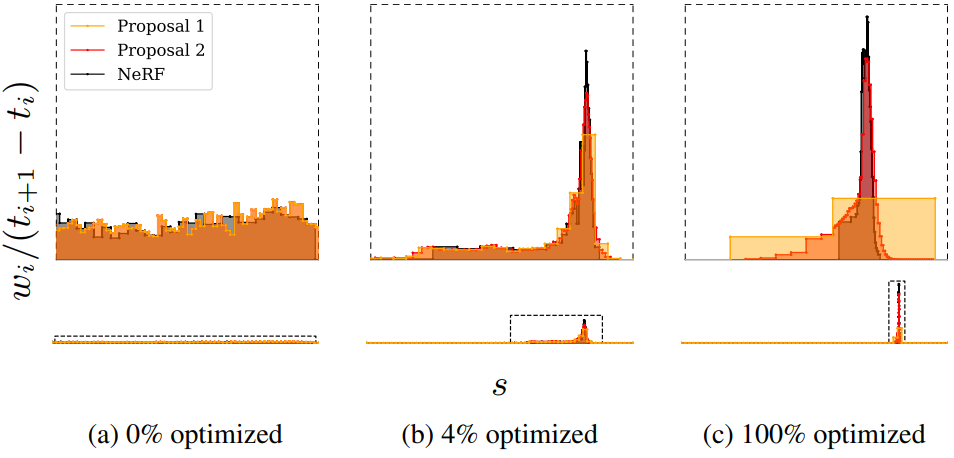
이 proposal supervision의 효과는 위 그림에서 볼 수 있다. 여기서 NeRF MLP는 장면의 표면 주위에 가중치 $\mathbf{w}$를 점차적으로 국한시키는 반면 proposal MLP는 NeRF 가중치를 포괄하는 대략적인 proposal 히스토그램을 따라잡아 예측한다.
Regularization for Interval-Based Models
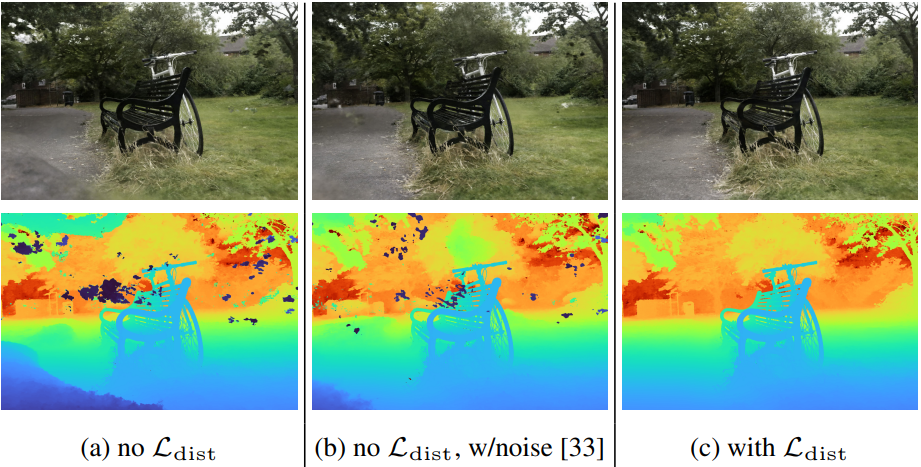
학습된 NeRF는 종종 위 그림의 (a)에 표시된 “floaters”와 “background collapse”라고 부르는 두 가지 특징적인 아티팩트를 나타낸다.
- Floater: 입력 뷰의 일부 측면을 설명하지만 다른 각도에서 보면 흐릿한 구름처럼 보이는 볼륨 밀도가 높은 공간의 작은 단절된 영역
- Background collapse: 멀리 있는 표면이 카메라에 가까운 dense한 콘텐츠의 반투명 구름으로 잘못 모델링되는 현상
저자들은 볼륨 밀도에 noise를 주입하는 데 NeRF의 방법보다 floaters와 background collapse를 더 효과적으로 방지하는 regularizer를 제시하였다.
Regularizer는 각 광선을 parameterize하는 정규화된 광선 거리의 집합 $\mathbf{s}$와 가중치의 집합 $\mathbf{w}$로 정의된 step function으로 간단하게 정의된다.
\[\begin{equation} \mathcal{L}_\textrm{dist} (\mathbf{s}, \mathbf{w}) = \iint_{-\infty}^{\infty} \mathbf{w}_\mathbf{s} (u) \mathbf{w}_\mathbf{s} (v) \vert u - v \vert d_u d_v \end{equation}\]여기서 \(\mathbf{w}_\mathbf{s} (u)\)는 $u$에서 $(\mathbf{s}, \mathbf{w})$에 의해 정의된 step function에 대한 보간이다.
\[\begin{equation} \mathbf{w}_\mathbf{s} (u) = \sum_i w_i \unicode{x1D7D9}_{[s_i, s_{i+1})]} (u) \end{equation}\]$\mathbf{t}$를 사용하면 먼 간격의 가중치가 크게 증가하고 가까운 간격이 효과적으로 무시되기 때문에 정규화된 광선 거리 $\mathbf{s}$를 사용한다. 이 loss는 NeRF MLP에 의해 각 점에 할당된 가중치 $w$ 의해 조정된 이 1D step function을 따라 모든 점 쌍 사이의 거리를 적분한 것이다. 이것을 “distortion”이라고 부르는데, 이는 k-means에 의해 최소화된 distortion의 연속적인 버전과 유사하기 때문이다. 이 loss는 $\mathbf{w} = \mathbf{0}$으로 설정하여 최소화된다. 이것이 가능하지 않은 경우 (즉, 광선이 비어 있지 않은 경우) 가중치를 가능한 한 작은 영역으로 통합하여 최소화된다.
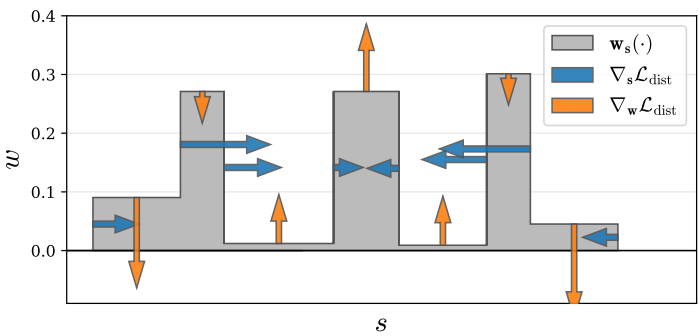
위 그림은 toy 히스토그램에서 이러한 loss의 기울기를 보여준다.
\(\mathcal{L}_\textrm{dist} (\mathbf{s}, \mathbf{w})\)는 정의하기가 간단하지만 계산하기가 쉽지 않다. 그러나 \(\mathbf{w}_\mathbf{s} (\cdot)\)는 각 간격 내에서 상수 값을 갖기 때문에 다음과 같이 다시 쓸 수 있다.
\[\begin{aligned} \mathcal{L}_\textrm{dist} (\mathbf{s}, \mathbf{w}) &= \sum_{i,j} w_i w_j \bigg\vert \frac{s_i + s_{i+1}}{2} - \frac{s_j + s_{j+1}}{2} \bigg\vert \\ &+ \frac{1}{3} \sum_i w_i^2 (s_{i+1} - s_i) \end{aligned}\]이 식에서는 distortion loss를 계산하기가 간단하다. 이 재정의는 이 loss가 어떻게 동작하는지에 대한 어떤 직관도 제공한다. 첫 번째 항은 모든 간격의 중점 쌍 간의 가중 거리를 최소화하고, 두 번째 항은 각 개별 간격의 가중 크기를 최소화한다.
Optimization
저자들은 4개의 레이어와 256개의 hidden unit이 있는 proposal MLP와 8개의 레이어와 1024개의 hidden unit이 있는 NeRF MLP를 사용하였다. 둘 다 ReLU activation과 밀도 $\tau$에 대한 softplus activation을 사용한다. \((\hat{\mathbf{s}}^0, \hat{\mathbf{w}}^0)\)와 \((\hat{\mathbf{s}}^1, \hat{\mathbf{w}}^1)\)을 생성하기 위해 각각 64개의 샘플을 사용하여 proposal MLP를 평가하고 리샘플링한 다음, \((\mathbf{s}, \mathbf{w})\)를 생성하기 위해 32개의 샘플을 사용하여 NeRF MLP를 평가한다. 다음과 같은 loss를 최소화한다.
\[\begin{equation} \mathcal{L}_\textrm{recon} (\mathbf{C}(\mathbf{t}), \mathbf{C}^\ast) + \lambda \mathcal{L}_\textrm{dist} (\mathbf{s}, \mathbf{w}) + \sum_{k=0}^1 \mathcal{L}_\textrm{prop} (\mathbf{s}, \mathbf{w}, \hat{\mathbf{s}}^k, \hat{\mathbf{w}}^k) \end{equation}\]각 batch의 모든 광선에 대한 평균을 계산한다. $\lambda$ hyperparameter는 데이터 항 \(\mathcal{L}_\textrm{recon}\)과 regularizer \(\mathcal{L}_\textrm{dist}\)의 균형을 유지한다. 모든 실험에서 $\lambda = 0.01$로 설정되었다. \(\mathcal{L}_\textrm{prop}\)에 사용된 stop-gradient는 $\Theta_\textrm{NeRF}$의 최적화와 독립적으로 $\Theta_\textrm{prop}$의 최적화를 수행하므로 \(\mathcal{L}_\textrm{prop}\)의 효과를 확장하기 위한 hyperparameter가 필요하지 않다. \(\mathcal{L}_\textrm{recon}\)의 경우 Charbonnier loss
\[\begin{equation} \sqrt{(x - x^\ast)^2 + \epsilon^2} \end{equation}\]를 사용한다 ($\epsilon = 0.001$). 이는 mip-NeRF에서 사용되는 평균 제곱 오차보다 약간 더 안정적인 최적화를 달성한다.
저자들은 mip-NeRF 학습 일정의 약간 수정된 버전을 사용하여 모델을 학습시켰다.
- optimizer: Adam ($\beta_1 = 0.9$, $\beta_2 = 0.999$, $\epsilon = 10^{-6}$)
- batch size: $2^{14}$
- iteration: 25만
- learning rate: $2 \times 10^{-3}$에서 $2 \times 10^{-5}$까지 로그 선형적으로 어닐링
- warmup: 512 iteration
- gradient clipping: $10^{-3}$
Results
Comparative evaluation
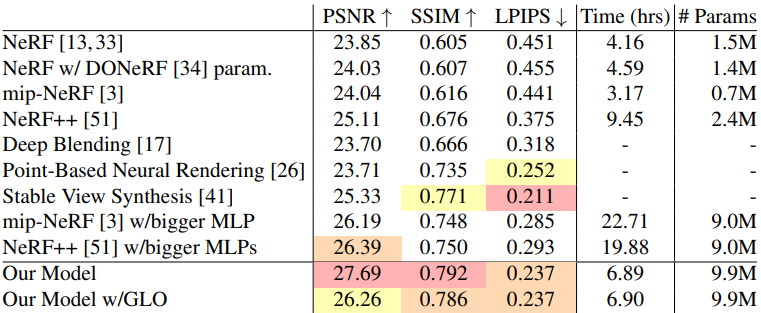
다음은 여러 이전 방법들과 정량적으로 비교한 표이다.
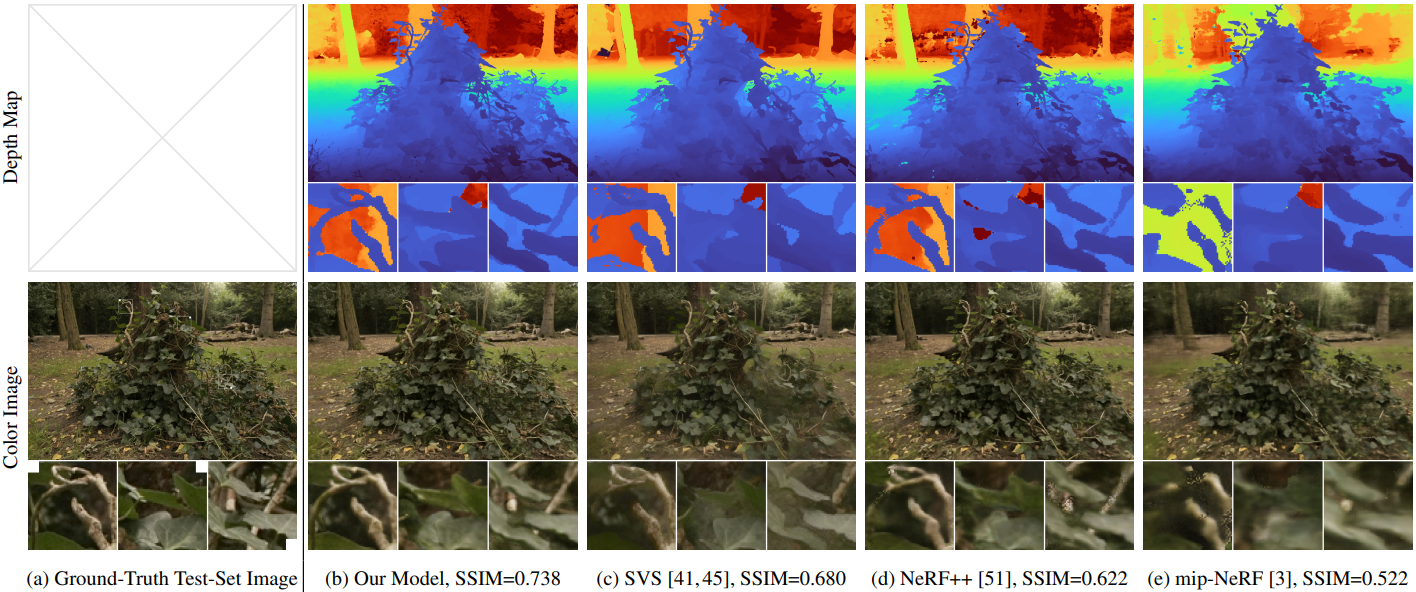
다음은 여러 이전 방법들과 결과를 비교한 것이다.
Ablation study
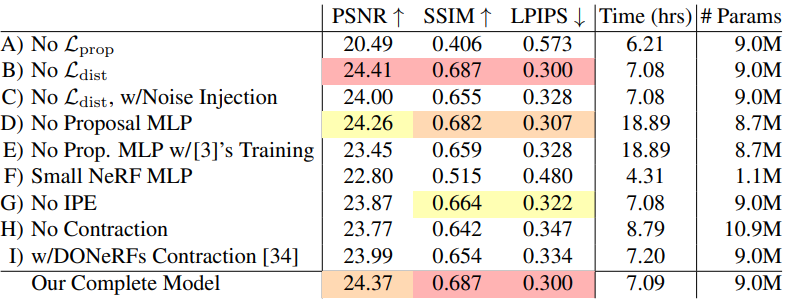
다음은 ablation study 결과이다.
Limitations
- 일부 얇은 구조와 미세한 디테일이 누락될 수 있다.
- 카메라가 장면 중앙에서 멀리 이동하면 뷰 합성 품질이 저하될 수 있다.
- 대부분의 NeRF-like 모델과 마찬가지로 장면을 복구하려면 몇 시간의 학습이 필요하다.