[논문리뷰] FLoD: Integrating Flexible Level of Detail into 3D Gaussian Splatting for Customizable Rendering
SIGGRAPH 2025. [Paper] [Page]
Yunji Seo, Young Sun Choi, Hyun Seung Son, Youngjung Uh
Yonsei University
23 Aug 2024
Introduction
3D Gaussian Splatting (3DGS)은 매우 빠른 렌더링 속도에서 사실적인 품질을 보여주었다. 상당한 발전에도 불구하고 3DGS는 상당한 메모리가 필요하다. 장면에서 복잡한 물체의 수가 증가함에 따라 정확한 모델링을 위해 더 많은 Gaussian이 필요하여 메모리 사용량이 증가하고 프레임 속도가 낮아진다. 메모리 필요량의 증가로 인해 장면을 렌더링하기 위해 대용량 GPU 메모리가 있는 하이엔드 장치가 필요하여 메모리 용량이 다양한 장치에서 렌더링할 수 있는 유연성이 제한된다.
저자들은 렌더링에서 더 큰 유연성이 필요하다는 필요성에 따라 3DGS 프레임워크에 LoD (Level of Detail) 개념을 통합했다. 이를 통해 디테일 수준을 조정하여 다양한 하드웨어 파워를 갖춘 다양한 시스템에서 애플리케이션이 효과적으로 작동할 수 있다. 3DGS에 LoD를 통합하는 최근 연구들은 하이엔드 GPU에서 실시간 렌더링을 가능하게 하였지만 저가형 장치에 대한 유연성이 부족하다. 따라서 LoD를 3DGS에 통합하여 하이엔드 서버에서 노트북에 이르기까지 더 광범위한 하드웨어를 수용할 수 있는 보다 유연한 렌더링 옵션을 제공하는 것이 본 논문의 목표이다.
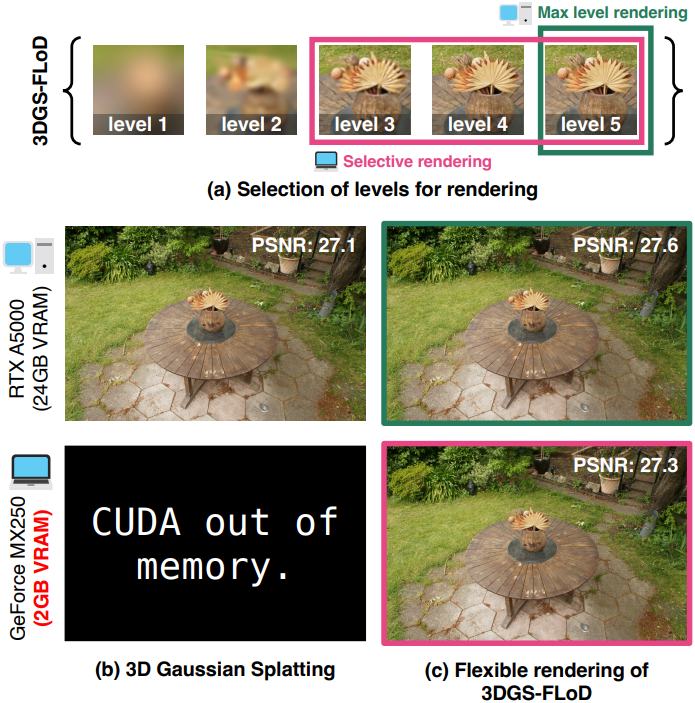
본 논문에서는 3DGS 내에서 사용 가능한 메모리 용량을 충족하는 레벨을 선택하면서도 전체 장면 콘텐츠를 보존할 수 있는 유연성을 제공하는 방법인 Flexible Level of Detail (FLoD)을 소개한다. 각 Gaussian 레벨에 scale 범위를 설정하여 각 레벨에 맞는 디테일을 갖도록 설계한다. 또한 레벨 전체에서 일관된 3D 구조를 유지하고 모든 레벨에서 향상된 렌더링 품질을 달성하기 위해 레벨별로 학습을 진행한다. 여러 레벨의 표현을 통해 이미지를 여러 디테일로 렌더링할 수 있으며, 이를 선택적 렌더링이라고 한다.
선택적 렌더링을 통해 이미지 품질 손실을 최소화하면서 더 빠르고 메모리 효율적인 렌더링이 가능하다. 결과적으로 FLoD는 사용자에게 다양한 메모리 용량의 장치에서 작동하는 커스터마이징 가능한 렌더링 옵션을 제공한다. 또한 FLoD는 3DGS 기반 모델에 쉽게 통합될 수 있으며 기본 모델과 비교하여 추가 계산 비용 없이 렌더링 품질을 향상시킨다.
Method
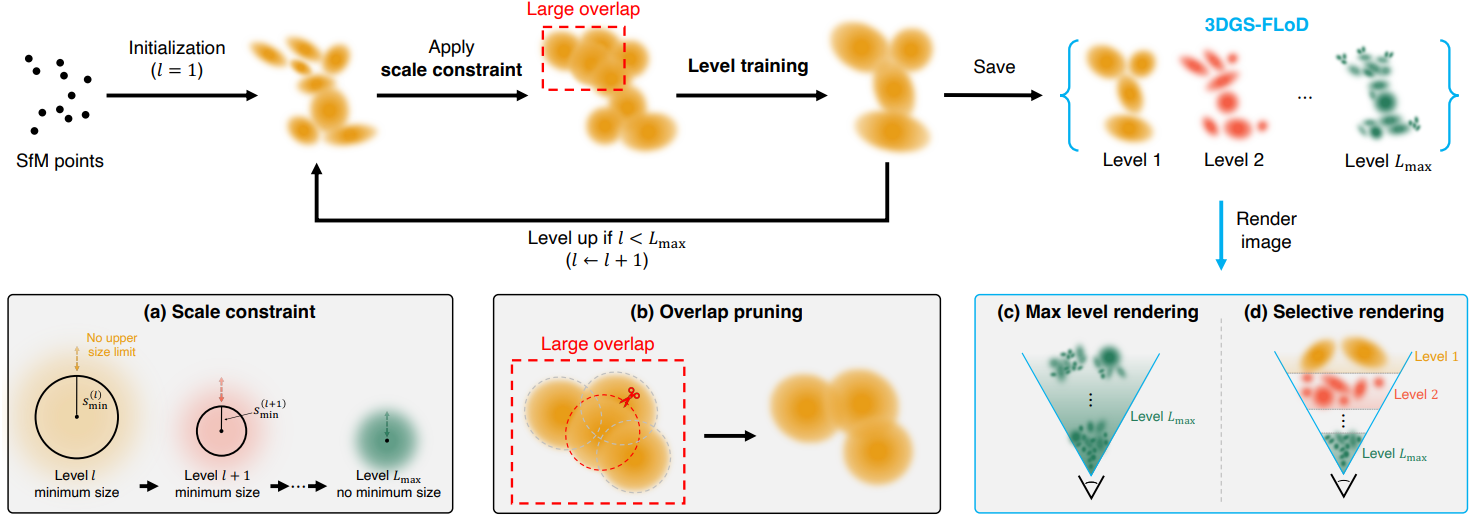
본 논문의 방법은 레벨 1에서 \(L_\textrm{max}\)까지 다양한 크기의 3D Gaussian을 사용하여 장면을 \(L_\textrm{max}\)개의 레벨로 구성된 3D Gaussian 표현으로 재구성한다. 레벨별 학습을 통해 각 레벨은 해당 레벨에 적합한 렌더링 품질을 최적화하는 동시에 전반적인 장면 구조를 독립적으로 캡처한다.
FLoD의 하위 레벨은 더 적고 더 큰 Gaussian을 사용하여 장면의 coarse한 구조를 재구성하는 반면, 상위 레벨은 더 많고 더 작은 Gaussian을 사용하여 디테일을 캡처하는 동시에 해당 레벨에 적합한 렌더링 품질을 최적화한다.
사용자는 렌더링을 위해 FLoD에서 하나의 레벨을 선택할 수 있다. 또한 선택적 렌더링 방법을 통해 여러 레벨을 함께 사용하여 렌더링 효율성을 개선할 수 있다.
1. Scale Constraint
\(l \in [1, L_\textrm{mas}]\)인 각 레벨 $l$에 대해 3D Gaussian의 하한으로 scale 제약 조건 \(s_\textrm{min}^{(l)}\)을 부과한다. \(s_\textrm{min}^{(l)}\)은 다음과 같이 정의된다.
\[\begin{equation} s_\textrm{min}^{(l)} = \begin{cases} \tau \times \rho^{1-l} & \quad \textrm{for} \; 1 \le l < L_\textrm{max} \\ 0 & \quad \textrm{for} \; l = L_\textrm{max} \end{cases} \end{equation}\]$\tau$는 초기 scale 제약 조건이고 $\rho$는 scale factor이다. 레벨 \(L_\textrm{max}\)에서는 제약 조건 없이 가장 세밀한 디테일을 재구성할 수 있도록 scale 제약 조건은 0이다. 레벨 $l$에서 3D Gaussian scale은 다음과 같이 정의된다.
\[\begin{equation} \mathbf{s}^{(l)} = e^{\mathbf{s}_\textrm{opt}} + s_\textrm{min}^{(l)} \end{equation}\]여기서 \(\mathbf{s}_\textrm{opt}\)는 scale에 대한 학습 가능한 파라미터이고 \(s_\textrm{min}^{(l)}\)은 고정되어 있다. \(e^{\mathbf{s}_\textrm{opt}} > 0\)이기 때문에 \(\mathbf{s}^{(l)} > s_\textrm{min}^{(l)}\)이다.
반면, 어떤 레벨에서도 Gaussian 크기에 대한 상한은 없다. 이를 통해 유연한 모델링이 가능하여 더 적고 더 큰 Gaussian으로 장면을 모델링할 수 있으며, 높은 레벨에서 많은 작은 Gaussian을 사용하는 중복을 피할 수 있다.
2. Level-by-level Training
Coarse-to-fine 학습 프로세스를 통해 다음 레벨의 Gaussian이 완전히 학습된 이전 레벨의 Gaussian에 의해 초기화되도록 한다. 3DGS와 유사하게 레벨 1의 Gaussian은 SFM 포인트에서 초기화되며, 각 레벨은 특정 iteration동안 densification과 pruning을 수행하고 이후에는 densification과 pruning 없이 최적화된다.
레벨 $l$에서 학습을 완료한 후 레벨 $l$의 최종 Gaussian으로 저장된다. 또한 레벨 $l$의 최종 Gaussian은 레벨 $l+1$의 Gaussian을 초기화하는 데 사용되며, scale은 다음과 같이 초기화된다.
\[\begin{equation} \mathbf{s}_\textrm{opt} = \log (\mathbf{s}^{(l)} - s_\textrm{min}^{(l+1)}) \end{equation}\]이렇게 하면 $\mathbf{s}^{(l+1)} = \mathbf{s}^{(l)}$을 만족하도록 초기화되어 Gaussian의 scale이 유지된다.
3. Overlap Pruning
저자들은 경험적으로 Gaussian 간의 과도한 중복이 아티팩트를 생성할 수 있음을 발견했다. 큰 중복이 있는 Gaussian을 제거하기 위해 세 nearest neighbor들의 평균 거리가 미리 정의된 threshold \(d_\textrm{OP}^{(l)}\) 아래로 떨어지는 Gaussian을 제거한다. \(d_\textrm{OP}^{(l)}\)는 \(s_\textrm{min}^{(l)}\)의 절반으로 설정된다. 이 방법은 전체 메모리 공간을 줄이는 추가 이점이 있다.
4. Selective Rendering
사용자는 가장 높은 레벨에서 작고 많은 Gaussian을 사용하여 고품질 렌더링을 얻을 수 있다. 그러나 이러한 렌더링은 느리거나 메모리 제한을 초과할 수도 있다. 따라서 여러 레벨의 3D Gaussian 세트 \(\{\mathbf{G}^{(l)} \; \vert \; l = 1, \ldots, L_\textrm{max}\}\)를 활용하여 더 빠르고 메모리 효율적으로 렌더링한다. 하나의 레벨에서 Gaussian을 렌더링하는 대신 장면의 여러 영역에 여러 레벨의 Gaussian을 할당하여 최소한의 품질 결함으로 렌더링 효율성을 개선한다.
원하는 레벨 범위 \(L_\textrm{start}\)에서 \(L_\textrm{end}\)까지 Gaussian을 샘플링하여 선택적 렌더링을 위한 Gaussian 세트 \(\mathbf{G}_\textrm{sel}\)를 생성한다.
\[\begin{equation} \mathbf{G}_\textrm{sel} = \bigcup_{l = L_\textrm{start}}^{L_\textrm{end}} \{ G^{(l)} \in \mathbf{G}^{(l)} \; \vert \; d_\textrm{proj}^{(l-1)} \ge d_{G^{(l)}} \ge d_\textrm{proj}^{(l)} \} \end{equation}\]여기서 \(d_\textrm{proj}^{(l)}\)는 카메라와의 거리가 $d_{G^{(l)}}$인 Gaussian $G^{(l)}$의 포함을 결정하며, 다음과 같이 정의된다.
\[\begin{equation} d_\textrm{proj}^{(l)} = \frac{s_\textrm{min}^{(l)}}{\gamma} \times f \end{equation}\]($\gamma$: screensize threshold, $f$: 초점 거리)
\(d_\textrm{proj}^{(L_\textrm{end})} = 0\), \(d_\textrm{proj}^{(L_\textrm{start}-1)} = \infty\)로 설정하여 \(L_\textrm{start}\)가 더 높은 레벨에서 아직 다루지 않은 장면의 나머지 더 먼 영역을 다루도록 한다.
계산 복잡도를 줄이기 위해 거리 \(d_\textrm{proj}^{(l)}\)에 따라 Gaussian을 선택한다. 이 방법은 선택적 렌더링 중에 모든 레벨 $l$의 Gaussian을 \(s_\textrm{min}^{(l)}\)과 동일한 scale을 갖는 것으로 취급한다. 이는 Gaussian이 최적화할 수 있는 가장 작은 scale을 나타내기 때문이다. 이 방법은 각 Gaussian의 2D projection을 개별적으로 계산하고 모든 레벨에서 $\gamma$와 비교할 필요가 없어 계산적으로 더 효율적이다.
Threshold $\gamma$와 레벨 범위 \([L_\textrm{start}, L_\textrm{end}]\)는 특정 메모리 제한이나 원하는 렌더링 속도에 맞게 조정할 수 있다. 작은 threshold와 높은 레벨 범위는 메모리와 속도보다 디테일을 우선시하는 반면, 큰 threshold와 낮은 레벨 범위는 디테일을 희생하는 대신 메모리 사용을 줄이고 렌더링 속도를 높인다.
5. Compatibility to Different Backbones
3D Gaussian에 3D scale 제약을 부과하는 FLoD는 다른 3DGS 기반 기술과 쉽게 통합할 수 있다. 저자들은 앵커 기반의 neural Gaussian을 활용하는 Scaffold-GS에 FLoD를 통합하였다. Neural Gaussian에 점진적으로 감소하는 scale 제약을 적용하여 여러 레벨의 Scaffold-GS 세트를 생성하며, 마찬가지로 레벨별 학습을 통해 최적화된다.
Experiment
- 데이터셋: Tanks&Temples, Mip-NeRF360, DL3DV-10K
- 구현 디테일
- GPU: NVIDIA RTX A5000 24GB 1개
- \(L_\textrm{max}\) = 5
- $\tau$ = 0.2, $\rho$ = 4
- densification 간격: 2000, 1000, 500, 500, 200
- overlap pruning: 매 1000 iteration
1. Results and Evaluation
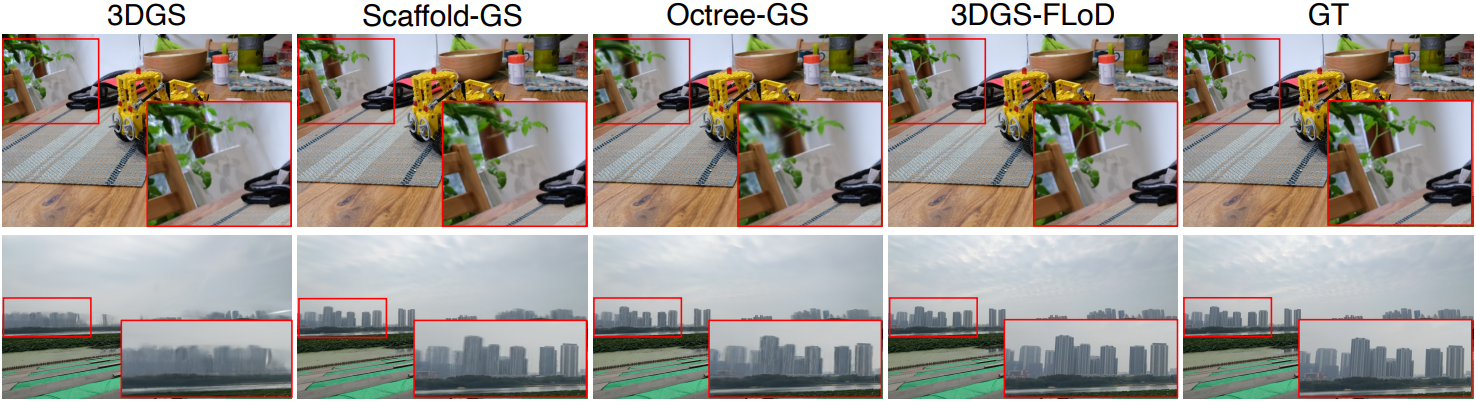
다음은 다른 방법들과 렌더링 성능을 비교한 결과이다.

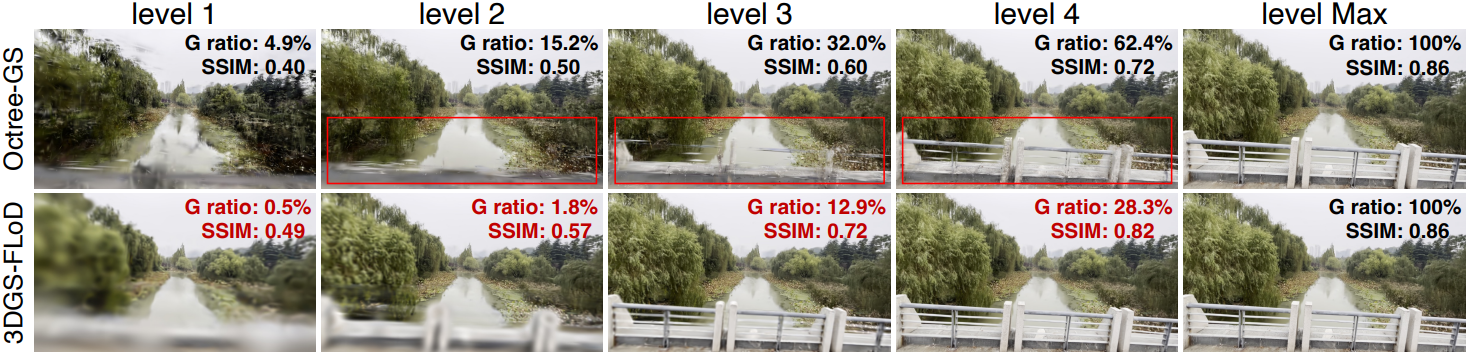
다음은 Octree-GS와 단일 레벨 렌더링 결과를 비교한 것이다.
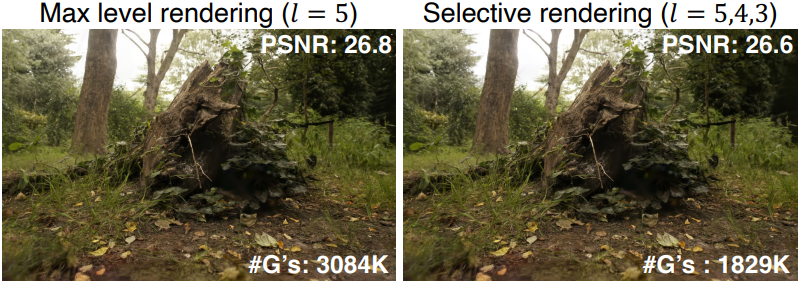
다음은 최대 레벨 렌더링과 선택적 렌더링 결과를 비교한 것이다.
다음은 $l = 3, 2, 1$만 렌더링한 결과를 Octree-GS와 비교한 것이다.

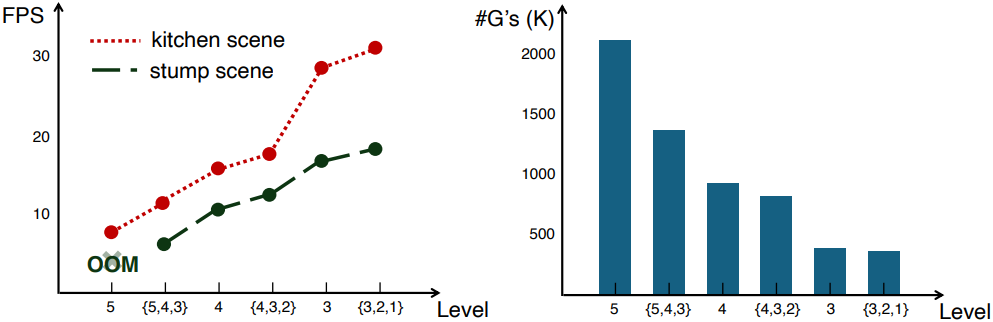
다음은 MX250 GPU에서의 FPS와 Gaussian 수를 레벨에 따라 비교한 그래프이다.
다음은 backbone 모델과 FLoD를 적용한 모델을 비교한 표이다.
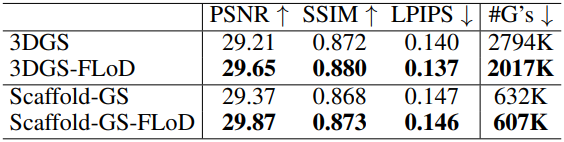
다음은 Scaffold-GS에 FLoD를 적용한 결과이다.

2. Ablation Study
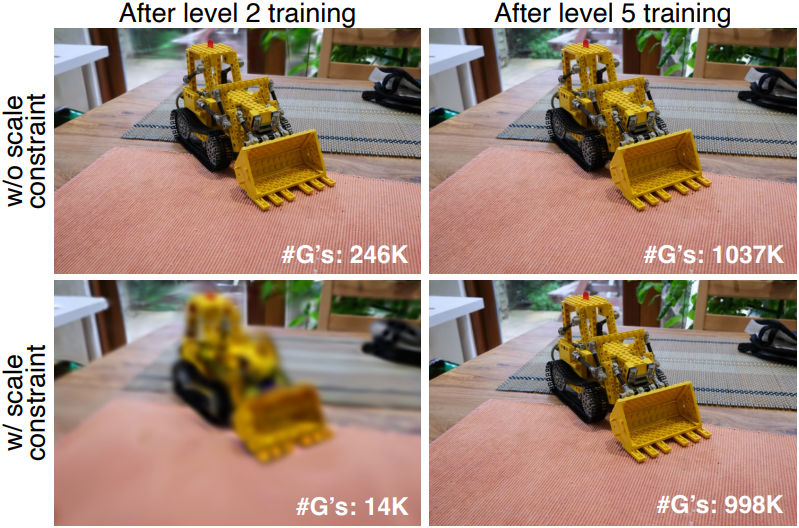
다음은 scale 제약 조건에 대한 ablation 결과이다.
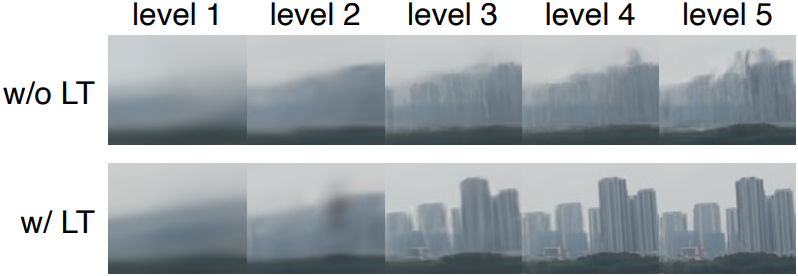
다음은 레벨별 학습에 대한 ablation 결과이다.
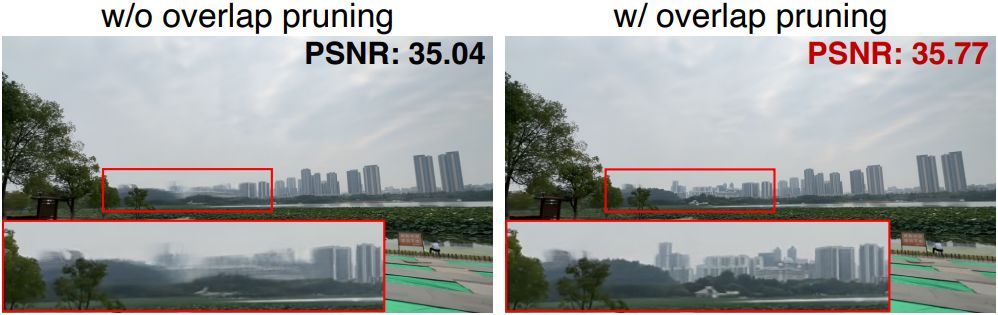
다음은 overlap pruning에 대한 ablation 결과이다.

Limitation
FLoD를 적용한 모델은 backbone 모델보다 런타임 메모리를 적게 사용하지만 모든 레벨을 수용하기 위해 더 큰 디스크 저장 공간이 필요하다.